Vex robotics
Vex robotics design system is another robot construction kit that lets you build many different robots using parts, sensors and other stuff designed to fit together as you imagine. Although I called it “a kit” that poorly describes it. Manufacturer’s description – “design system” is much more appropriate.
So, the Vex robotics system deserves to be called like that because it actually is it. Although there are some full-robot kits that introduce you to Vex, there are also various Vex components that can be easily used for your own robotics projects, such as structural parts, wheels, caterpillars, et cetera.
However, the true power of this system can be seen if all Vex robotics components are used together. This is also a great way to learn about robot building and its main concepts. While this may seem insignificant to experienced robot builders, the experience can be priceless for everyone else.
Let me tell you more about the Vex robotics design system itself, the available Vex kits, programming options and some other things that’ll come up my mind.
The system
In order to better explain the main robot building concepts and to keep everything nice and tidy, the Vex system is divided into subsystems. As that is the way manufacturer explains everything in the “vex inventor guide”, I’ll stick to it as well.
The Structural subsystem
As you can guess, the structural subsystem includes structural parts – all those parts that make the robot’s body. The chassis, if you like. So these are steel or aluminum sheet-metal parts with pre-fabricated square holes and compatible hardware – screws, nuts, etc.
These sheet-metal parts are designed to be modified, so they can be easily bent and cutCylindri to adjust to your needs. This is why I mentioned above that Vex structural parts can be used for other robotics projects as well. The structural subsystem includes threaded standoffs that can be used to make multiple-platform robots as well.
The Motion subsystem
This subsystem includes everything that enables movement – gears, bearings, squared shafts, rollers, wheels, treads and motors. There are different gears that you can use to increase torque and decrease speed or vice versa. Vex gears have square holes in the center so you can use them with square shafts. Beware though – if too much force is applied the shaft can slip out and damage the gear.
The shafts are squared with rounded corners. This way they can spin freely in the bearing while still transfer the force to gears. Various sized wheels, including omni-wheels (wheels that can travel in any direction) and treads are available as well.
There are also two types of motors under the motion subsystem – servomotors and continuous rotation motors (continuous rotation servos). If you don’t know the difference between them, I’ll briefly describe it. Regular motors rotate all the time, thus they can provide propulsion, for example. Servomotors, on the other hand, rotate to a certain degree – lift a crane for example.
The Power subsystem
The power subsystem is… batteries. You can use regular AA rechargeables with a battery holder, or you can use vex robotics battery packs. Regarding the rechargeable batteries you’d have to buy 14 AA cells – 6 batteries for your robot (the microcontroller) and 8 for the transmitter if you’d like to control the bot yourself.
Another option is the above mentioned rechargeable battery packs. 7.2 volt battery pack is needed for a robot and 9.6 volt power pack for the transmitter. If you opt for AA rechargeables – don’t use alkaline cells for a robot, NiCd are better suited for that.
The Sensor subsystem
As you can understand, the Vex robotics design system’s Sensor subsystem includes sensors – devices that “read” the surrounding environment. This way the robot can respond to various stimuli as programmed.
So, what sensors there are in the Vex robotics system? There are two touch switches – a limit switch and a bumper switch. One responds to a light touch, while the other is more like a hit sensor. You can mount it on your robot and hit him if he does something wrong. Just kidding! Although, why not?
There are also other sensors – an accelometer, a light sensor, an infrared line follower sensor, an ultrasonic range finder, an optical shaft enconder and a potentiometer. The optical shaft encoder lets you measure the number of revolutions and the direction of a rotating shaft and the potentiometer lets you measure the angular position of something.
The Control subsystem
While other robot kits often focus mainly on autonomous robots, Vex pays attention to remote controlled robots as well. You say that “real” robots are only autonomous ones? Well, there are those remote controlled bomb disposal robots, right? As far as I know, no one really doubts their… robotic traits.
OK, I’ll put the philosophical questions aside for now. So, as you can understand the remote control component is quite strong in Vex robotics design system. The control subsystem includes a transmitter, a receiver and a signal splitter.
The receiver has to be connected to a microcontroller in case you want your robot to exercise programmed behavior as well. If you just want to control your robot yourself without autonomous behavior, you can use a signal splitter instead. The signal splitter basically forwards transmitter’s channels to 6 PWM devices (motors and servomotors).
As the transmitter is quite clever, the latter configuration is enough if you want to build a remote controlled robot – the configuration options lets you control 6 motors as you wish. To avoid interference situations, different frequency crystals are available.
The Logic subsystem
The logic system does the thinking. As you can understand, it is the Vex microcontroller. You can drive motors, get feedback from sensors and execute programs with it. It comes with default software in it for simple robot operation.
The microcontroller has 8 PWM outputs for motors and servomotors, 16 analog/digital input/output ports as well as 6 interrupt inputs (some sensors use these instead of analog/digital inputs). When in analog mode, inputs have 10-bit resolution.
The default software enables you to make a simple robot with two (or four) motors and two obstacle detecting switches. Then it’s possible to run it in either user controlled mode or in autonomous mode where it’d wander around and try to avoid obstacles in its path.
Programming
Sure, remote controlled robots are cool, the default software in the Vex robotics microcontroller may be able to do some tasks as well. Still, there will be a moment when you’ll want your robot to manifest a bit more sophisticated behavior.
Obviously, when this moment comes, you’ll want to reprogram the default software. At the moment there are three “official” programming environments for Vex robotics design system. Namely, these are – EasyC (and EasyC PRO), RobotC and MPLAB.
EasyC is the right option for beginners in programming. This is for you if you like the idea of graphical programming environment where you can drag and drop modules. Near those modules you’ll see a code in C, so you can learn something as well. Global constants and variables as well as branching functions are available in EasyC.
RobotC is an intermediate solution with a powerful debugger, compiler and source code editor. As the advanced method – MPLAB IDE is available, this way you can directly program the PIC microcontroller that’s inside the Vex microcontroller.
All of the above mentioned environments use C programming language. However, there are some enthusiast-made programming options as well. If you fancy java there’s this jvex project, it seems that the last update was a while ago, but you can give it a shot. And if you’d like to program Vex robots with MSRS (Microsoft Robotics Studio), then you may want to check out this project.
Vex robot kits
Although many Vex component sets are called kits – tank tread kit, motor kit, metal kit, I’ll shortly describe available Vex robot kits – robot starter bundles as they call them. As you can understand, not everything above mentioned is included in these kits.
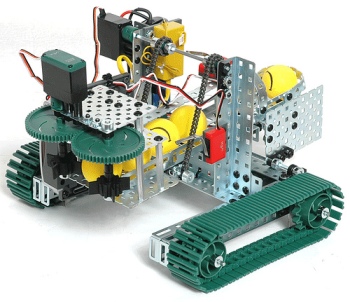
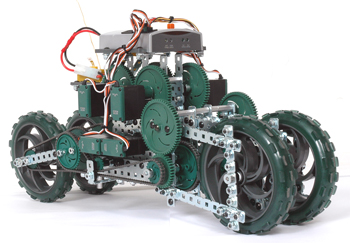
All robot starter bundles and Vex classroom lab kits are built around the protobot robot kit. Vex protobot robot kit includes all structural and motion parts – gears, wheels, sheet-metal, etc that is needed to build two robot designs – the protobot robot and the tumbler robot. 4 motors and a battery holder are included as well.
As you can understand, the protobot kit is not enough to make a functional robot. This is where robot starter bundles come in. There are three bundles – radio control, autonomous control and dual control bundles. Their names speak for themselves.
So, the radio control kit is a protobot kit with a transmitter and a receiver as well as a signal splitter included, the autonomous control is a protobot kit with a microcontroller, programming hardware and software as well as 2 limit switches and 2 bumper switches included. The dual control kit is a combination of these two.
The classroom kit is, basically, the dual control starter bundle, with additional gears, metal and hardware, a tank tread kit, a chain and sprocket kit and Vex batteries for both – Vex microcontroller and transmitter. This is designed as a laboratory kit for group studies.
Competition

Vex robotics design system is largely designed with a competition in mind. Different crystals under the control subsystem are one example of this. So, one of the main reasons to build a robot with Vex could be to compare your designing abilities with others.
Sure, sumo and line follower competitions provide you with this opportunity as well. So Vex competitions don’t directly compete with them. Well, you sure can build a sumo or a line follower using only Vex robotics design system’s parts, but that is not needed in most cases. Instead, Vex competitions utilize Vex robotics design system’s strong points.
By saying strong points I mean the ability to construct mechanically complex robots, and to control them remotely, or program an autonomous or semi-autonomous behavior. So, Vex challenges are designed to use this.
There are many Vex competitions held around the world (mostly in USA, though). So, the chances to find one near you are pretty good. On the other hand, if you feel like hosting an event, or just making a local one, it is possible to get all the needed equipment – challenges, game fields, et cetera.
I hope you found this article interesting! If you’re interested in this kind of kits, you may want to check out my article on other robot construction kits as well.