Search and rescue robots
The idea of search and rescue robots emerged at the beginning of the 1980s. Nevertheless, until the 1990s there weren’t any real development in this field. Although robots are not widely used in actual search and rescue situations at the moment the development in this field seems quite promising.
At the first moment things can seem pretty straightforward – we need robots that could penetrate rubble piles and find people beneath them. Although this task itself is quite daunting, search and rescue is much wider than that. There are many possible situations and different tasks that could be done by robots.
Search and rescue situations
There are many things that could go wrong and affect certain part of population. There can be wildfires, tsunamis, earthquakes, and man-made disasters such as Chernobyl or 9/11. Some of these disasters can create similar consequences; some, on the other hand, can be quite unique.

Two most common situations are urban search and rescue (US&R;, USAR) and wide area search and rescue. These situations can be caused both – by men and by nature. An earthquake as well as a bombing run can create a USAR situation.
When dealing with a search and rescue situation in an urban environment, usually, the rescuers have to deal with collapsed buildings, victims trapped under the rubble and other problems unique to such environment. Also, it should be noted that wireless communication can be severely disturbed because of large volume of steel in the rubble.
Wide area search and rescue situations, on the other hand, are usually caused by natural disasters such as floods and wildfires. In these cases a large amount of small to medium buildings has to be searched for victims. Usually, in these situations the survival rate is much higher compared to USAR.
Also other search and rescue situations are possible such as water based and wilderness search and rescue. Water based S&R; deals with floods or traffic accidents. Wilderness S&R; deals with searching for people lost in the wilderness.
Of course, these situations can overlap considerably. An earthquake can affect a wide area ruining a city, wrecking a dam and disrupting communication with some hikers. In this case this earthquake would cause all of the aforementioned situations. OK, maybe I exaggerated a bit but you got the point.
Other situations such as air and sea S&R; are possible too. Rescue robots are currently developed and tested mostly in aforementioned situations. Sometimes it is said that there are man-made disasters and natural disasters. Usually, manmade disasters are said to create USAR situations while natural disasters – situations I called wide area S&R.;
I decided to use aforementioned division because a man can start a wildfire and an earthquake can wreck a building. However, there are some distinctive traits when talking about manmade disasters. These can include dealing with hazardous materials, radiation and other nasty stuff, think Chernobyl.
Tasks at hand and suitable robots
So, you’d like to know what tasks there are that could be done by search and rescue robots to aid rescuers. Although there are many tasks on the rescue site, robots should be used where human or canine rescuers are powerless or where robots can do tasks at hand more effectively.
Reconnaissance and mapping is an especially important task in wide area rescue situations created by natural disasters. In these situations, assessment of situation is needed to launch search and rescue missions successfully. In this task unmanned aerial vehicles could be very useful.
Search is another essential task. Victims has to be found first in order to rescue them. In order to use robots for search in wide area S&R; situations they’d have to do the work at least as efficient as humans can. Whether it is possible is a disputable question.
However, there are big hopes that robots will aid search missions in urban search and rescue situations in a foreseeable future. Small unmanned ground vehicles could penetrate the rubble deeper than humans or canine rescuers can, thus enabling the rescuers to find victims at a faster rate.
Other rubble penetration situations. Robots’ ability to penetrate rubble can be used for other purposes as well. This ability can be used to aid in structural inspection of the rubble by enabling more throughout and complete view. Also in-situ medical assessment could be provided using this ability.
Rubble removal and aid in victim extraction. The rubble removal operations in search and rescue situations are considerably different than rubble removal in construction or demolishing tasks. Still, rescue robots and exoskeletons could be used to aid rescuers in this task.
Telepresence is another robot application that could find its way in S&R; situations. One way how to use telepresence is to use a rescue robot as “ears and eyes” of a team member that is outside the rubble. This way the needs of the team could be communicated faster. Also, telemedicine could be very useful.
Logistics. Larger unmanned ground vehicles could also be used for logistics purposes. It could be fairly easily to adapt specific military transportation robots to be used as rescue robots. This could be one of the achievable tasks in a near future.
Hazmat situations could also benefit from robot use. Such manmade disasters as Chernobyl could’ve been treated more successfully if robots were used. Also, robots could be able to start searching in places still burning and other situations where human rescuers are helpless.
As you see, some of these applications are similar to those of military robot applications but many are unique. Usually, robots intended for other tasks are equipped and adapted to be used in search and rescue situations.
Actual applications and research efforts
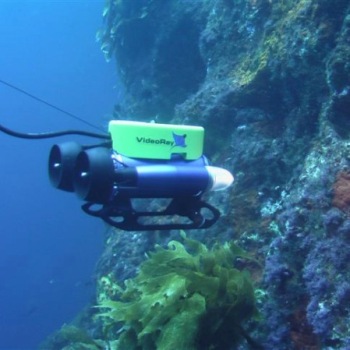
Although the potential of this field is enormous, as far as I’m aware actual application is not widespread. There are remotely operated underwater vehicles such as VideoRay you can see in this picture. This kind of devices is fairly widespread. Also some UAV’s such as the Predator has been put to an actual application.
Still, rescue robots are not used by rescue teams on USAR sites yet. This is because of the general suspicion and insufficiently advanced technologies. At the moment a team of at least 2-3 people is needed to operate a rescue robot.
However, robots have been used in different disasters by research institutions with varying success. Inuktun and Foster-Miller robots have been used in 9/11 where they operated fairly successfully managing to locate approximately 10 sets of remains. Also UAV’s were used and tested at numerous hurricanes by research institutions.
There are two main research institutions in this field I am aware about – the CRASAR that stands for “center for robot assisted search and rescue” and the International Rescue System Institute. The first one is based in USA and the second in Japan.
If you are interested in this field or you believe you can support these efforts somehow it is possible to contact the scientists. Although it is fairly easily to find the contacts on the net, I’ll give you a place to start.
I really hope that you are interested in this field. I’d be even happier if I’ve managed to spark this interest in you. Things I’ve told here are only a small part of this promising and swiftly developing field. I hope I managed to give you an introduction on this topic and you found something new here.
Go back from “Search and Rescue robots” to “Military robots”.